■ログイン
- ソリューションUIにブラウザ上でアクセスします。
Ethernet接続、VPN接続、VPN Webgateの3つの方法が存在します。
- 管理者利用者はユーザー名/パスワードを入力しサインインしてください。
- ゲスト利用者は”ゲストとしてアクセス”からログインが可能です。
.png?width=688&height=280&name=Untitled%20(13).png)
■カメラ一覧
- 各Steamごとの稼働状況と過去6時間の解析データを簡易グラフで確認できます。
.png?width=688&height=331&name=Untitled%20(14).png)
■解析の設定
- Steamを選択すると、カメラ情報や撮影・解析状況が確認できます。
- 映像解析を設定を選択し、エリアの設定を行います。
.png?width=688&height=526&name=Untitled%20(15).png)
エリア設定①_分析タイプCount
- 「エリア追加」を押し、画像上の検知した部分を囲みます。
【設定例】エリア内の人・車・自転車の個数をカウントする
.png?width=688&height=754&name=Untitled%20(16).png)
▻各種設定項目
| ①エリア名 |
テキストで入力 |
|---|---|
| ②エリア辺数 | エリアの頂点数を増やしたり減らしたりするボタン |
| ③有効・無効トグル | このエリアの検知を有効にするか無効にするか設定するトグル |
| ④分析タイプ | ●Count / Ratioで選択 Count:物体検知でエリア内で検知された物体から、条件に合致する物体の数をカウント Ratio:水面検知の結果を基に、エリア内の水面と判定された割合を計算 |
| ⑤分析ターゲット | ●Count選択時のみ 【登録したアルゴリズム】 ClowdLocalization:headのみ Yolov4の場合:car / person / bicycle等、cocoが指定する種別から選択 |
| ⑥セグメンテーション |
●水面orなし 水面の場合は検出物が水面にある場合にカウントの対象となる |
| ⑦検出ポイント |
足元(Clowd/Yolo):検知矩形の5倍下の下辺中央 頭部(Clowdのみ):検知矩形の下辺中央 |
| ⑧検出サイズ | 検出矩形を1倍とし、検出ポイントからどのぐらいの広さの面積に対して、水面がエリア閾値以上で占めているか判定するための値 |
| ⑨エリア閾値 | カウント対象として検出ポイント周辺の面積に対してどのぐらいの割合で水面が占めているかを判定する数値 |
| ⑩カウント閾値 | メール発報のカウント閾値 この値以上の数量を検知した場合に発報等を行う |
| ⑪検出確率 | yolo設定時は検知の確からしさの数値の判定閾値60%程度が推奨値 (crowd設定時は確からしさがすべて100%のため事実上無効) |
| ⑫最小幅 | 検知矩形のフィルター項目。ピクセル値で指定 |
| 最大幅 | 検知矩形のフィルター項目。ピクセル値で指定 |
| 最小高さ | 検知矩形のフィルター項目。ピクセル値で指定 |
| 最大高さ | 検知矩形のフィルター項目。ピクセル値で指定 |
| ⑬トリガー時間 | この秒数以上連続してカウント閾値を超えて検知していた場合発報とするための時間 |
| 送信クールダウン | 一度発報した後連続して発報しないための抑制秒数 |
エリア設定②_分析タイプRatio
【設定例②】水面の増減を検知する
.png?width=688&height=559&name=Untitled%20(17).png)
▻各種設定項目
| エリア名 |
テキストで入力 |
|---|---|
| エリア辺数 | エリアの頂点数を増やしたり減らしたりするボタン |
| 有効・無効トグル | このエリアの検知を有効にするか無効にするか設定するトグル |
| 分析タイプ | Ratio |
| セグメンテーション | 水面指定 |
| エリア閾値 | エリアの面積に対してどのぐらいの割合で水面が占めているかを判定する数値 |
| トリガー時間 | この秒数以上連続してカウント閾値を超えて検知していた場合発報とするための時間 |
| 送信クールダウン | 一度発報した後連続して発報しないための抑制秒数 |
※エリア設定時の注意点
- 必ずエッジ端末にてFog Broadcasterの設定後、エリア設定を行ってください。
- エッジ端末にてFog Broadcasterの設定前にエリア設定した場合、Clowd Localizationの利用が前提となった解析が行われる可能性があります。
- Fog Broadcasterの設定がUIに反映されるまでに、最大60秒の待ち時間が発生します。その為、反映前にエリア設定した場合、設定の一部が誤ったものになる可能性があります。
■エリア内に物体が存在するとしてカウントされる条件
-
物体がUIで指定した分析ターゲットリストに含まれていること
-
物体である確率が指定された検出確率より高いこと
-
物体のサイズが、UIで指定した最小幅・最大幅・最小高・最大高さ似内に収まっていること
-
物体が指定されたエリア内に入っていること
①足元で検出する場合(Clowd/Yolo):足元座標計算式から足元の中心点を定める。
②頭部で検出する場合(Clow):頭部座標計算式から頭部の中心点を定める。
③物体の高さと幅に対して、UIから指定された検出サイズを掛けた値をもとに、頭部もしくは足元座標を中心とする仮想的なバウンディングボックスを作
④上記の仮想的なBBoxの右上座標および左下座標の両方が該当エリア内に入っている事
(例)Yolo v4の場合:足元座標系算式"X": "x+w/2", "Y": "y+h/2"}
.png?width=688&height=651&name=Untitled%20(18).png)
※水面の場合
- 水面近傍に存在する物体の数をカウントします。
- 物体が該当エリア内にいるための条件を満たすため、バウンディングボックス内部において、水面と判定されたピクセル数の割合が、UIで指定したエリア閾値を越えていること。
■ゲストユーザー利用
- ゲストとしてアクセスをクリックしログインします。
.png?width=688&height=280&name=Untitled%20(19).png)
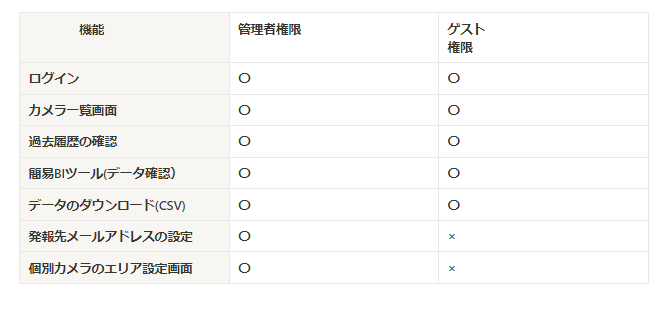
- 利用できる機能について
- ゲストユーザー利用の場合、「アラート発砲のメールアドレスの設定」と「個別カメラのエリアや解析内容の設定」を行うことは出来ません。(画面UIに表示無し)